-

High Voltage Rotary Actuators MIS Series
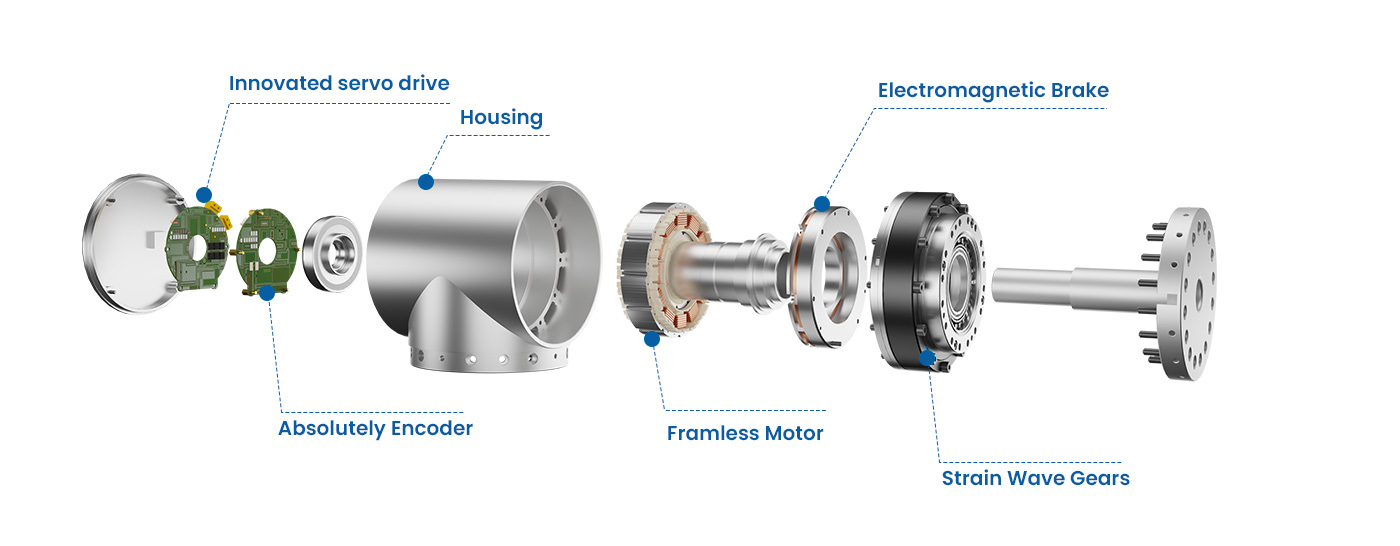
The high-voltage rotary actuators is an integrated device that integrates harmonic reducers, high-quality frameless motors, encoders, and other electromechanical products. It has the characteristics of small size, high precision, and large hollow space, which greatly reduces the complexity of selection, design and manufacturing costs for clients. The high-voltage rotary actuators is divided into high-voltage basic model and high-voltage standard model. The high-voltage basic model has an ordinary medium hole, a single encoder, and no brake; the high-voltage standard model has an extra large medium hole, dual encoders, and a brake.
More -

High Voltage Rotary Actuators MIB
The high-voltage rotary actuators is an integrated device that integrates harmonic reducers, high-quality frameless motors, encoders, and other electromechanical products. It has the characteristics of small size, high precision, and large hollow space, which greatly reduces the complexity of selection, design and manufacturing costs for clients. The high-voltage rotary actuators is divided into high-voltage basic model and high-voltage standard model. The high-voltage basic model has an ordinary medium hole, a single encoder, and no brake; the high-voltage standard model has an extra large medium hole, dual encoders, and a brake.
More